Visual SLAM and Cartographer
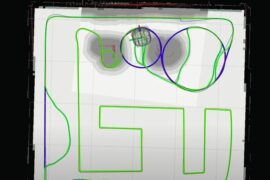
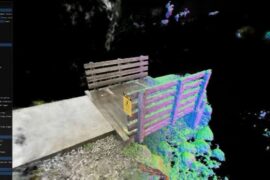
We are slam experts, developing, contributing and integrating proprietary and Open Source libraries (like Cartographer, ORBSlam,…) for Visual SLAM, laser-based SLAM, 2D and 3D based SLAM.
Read Visual SLAM and Cartographer